ROS使用动态链接库(.so文件) 问题最近在捣鼓使用CAN总线分析仪,在ROS编程使用,二次开发需要用到它的动态链接库。之前也没使用过,也不知道怎么搞,在网上查找了一下资料,发现有很多方法,这里我记录一下谷歌到的一种方法,点击这里查看原文。 解决方法1、在你需要使用动态链接库的那个Ros功能包下新建一个lib文件夹,存放你需要使用的.so文件。 2、修改CmakeLists.txt文件,在target_link_libraries 2020-02-13 ROS > Others #ROS #.so文件
两轮差速底盘SLAM系列(2)--CAN总线协议 Here's something encrypted, password is required to continue reading. 2020-02-11 ROS > 两轮差速底盘SLAM #ROS #SLAM
两轮差速底盘SLAM系列(1)--机器人必备条件 前言本系列博文主要是博主在学习实现两轮差速机器人小车SLAM与自主导航功能的学习记录,并且整理成个人认为可以看得懂的简易教程,方便以后自己可以回顾复习。 项目内容本次两轮差速机器人项目包含下面内容: cmd_vel话题消息可控 激光雷达SLAM建图 move_base路径规划避障 Amcl导航 要想实现机器人SLAM与自主导航功能,需要满足下面的基本条件。 项目架构 上位机ROS主控使用笔记本 2020-02-11 ROS > 两轮差速底盘SLAM #ROS #SLAM
趁年轻,加油"肝" Here's something encrypted, password is required to continue reading. 2020-02-10 生活杂录 > 随想随谈 #随笔
Hexo+GitHub搭建个人博客 前言之前一直都是使用Jeklly+Github Pages搭建的博客,可能是使用久了感觉看上去不是很满意。索性就趁这两天有空改用Hexo+Github Pages搭建博客了。 我真是个花心Boy (─‿‿─) 关于GitHub Pages这是它的官网介绍GitHub pages 开始搭建主页效果图 安装工具详细参考hexo官网文档 安装Git1sudo apt-get install git-co 2020-02-09 博客相关 > Hexo #Github #Hexo
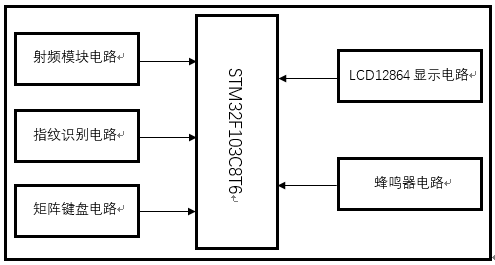
基于STM32的智能门锁系统设计 一、项目介绍本系统由STM32F103C8T6单片机主控芯片、电源供电稳压模块、LCD显示屏模块、薄膜矩阵键盘模块、指纹识别模块、RFID射频模块、蜂鸣器模块以及舵机模块组成。实现以下功能: 支持指纹、NFC、密码及感应卡四种开锁方式; 具有分级管理权限,管理员才可增删信息,在管理员模式,可以进行更改开锁密码和管理员密码,以及增删指纹/感应卡信息。 密码断电也不会丢失,具有断电存储功能,设定 2019-12-28 嵌入式 > STM32 #STM32 #智能门锁系统
STM32F103学习笔记——RC522射频卡 使用STM32F103读取识别RFID-RC522模块。移植了野火的代码,去掉显示屏,使用串口显示调试信息。 2019-12-21 嵌入式 > STM32 #STM32 #RC522
STM32F103学习笔记——AS608指纹识别模块的使用 在STM32F103C8T6上成功测试运行,移植修改战舰源码,不用LCD屏幕来测试,只用串口助手来进行指纹模块的测试,具体有录入指纹、删除指纹、刷指纹等操作。 2019-12-17 嵌入式 > STM32 #STM32 #指纹识别
STM32F103读写内部flash 最近由于项目需要,有一些程序运行参数需要保存。这些数据的特点是:数量少而且不需要经常修改,但又不能定义为常量,因为以后还有修改的可能。考虑到这些数据量比较少,使用专门的存储单元既不经济,也没有必要。 因此,在需要保存一些芯片掉电之后依旧需要保存的数据(数据量不是特别大)时,运用内置flash的空闲部分可以为我们省去一颗eeprom或外置flash的花销。 一、介绍这里以中容量产品STM32F10 2019-12-15 嵌入式 > STM32 #STM32 #Flash