Turtlebot3仿真1-ROS仿真环境搭建(kinetic版)
本文最后更新于:2022年5月29日 上午
前言
系统:Ubuntu 16.04
ROS版本:Kinetic
Ubuntu16.04安装ROS-Kinetic:Ubuntu16.04 install Ros(Kinetic)
操作步骤
安装仿真系统依赖包
1 | |
Turtlebot3包安装
安装turtlebot3依赖包:
1
sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-interactive-markers安装turtlebot3源码:
1
2
3
4mkdir -p ~/tb3_ws/src/ && cd ~/tb3_ws/src/
git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
cd ~/tb3_ws && catkin_make添加模型声明
1
2echo "export TURTLEBOT3_MODEL=burger" >> ~/.bashrc
## TURTLEBOT3_MODEL有burger, waffle或waffle_pi三种环境设置
1
echo "source ~/tb3_ws/devel/setup.bash" >> ~/.bashrc
安装turtlebot3_simulation包
1 | |
安装完成测试
启动仿真:
1
roslaunch turtlebot3_fake turtlebot3_fake.launch启动键盘控制
1
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
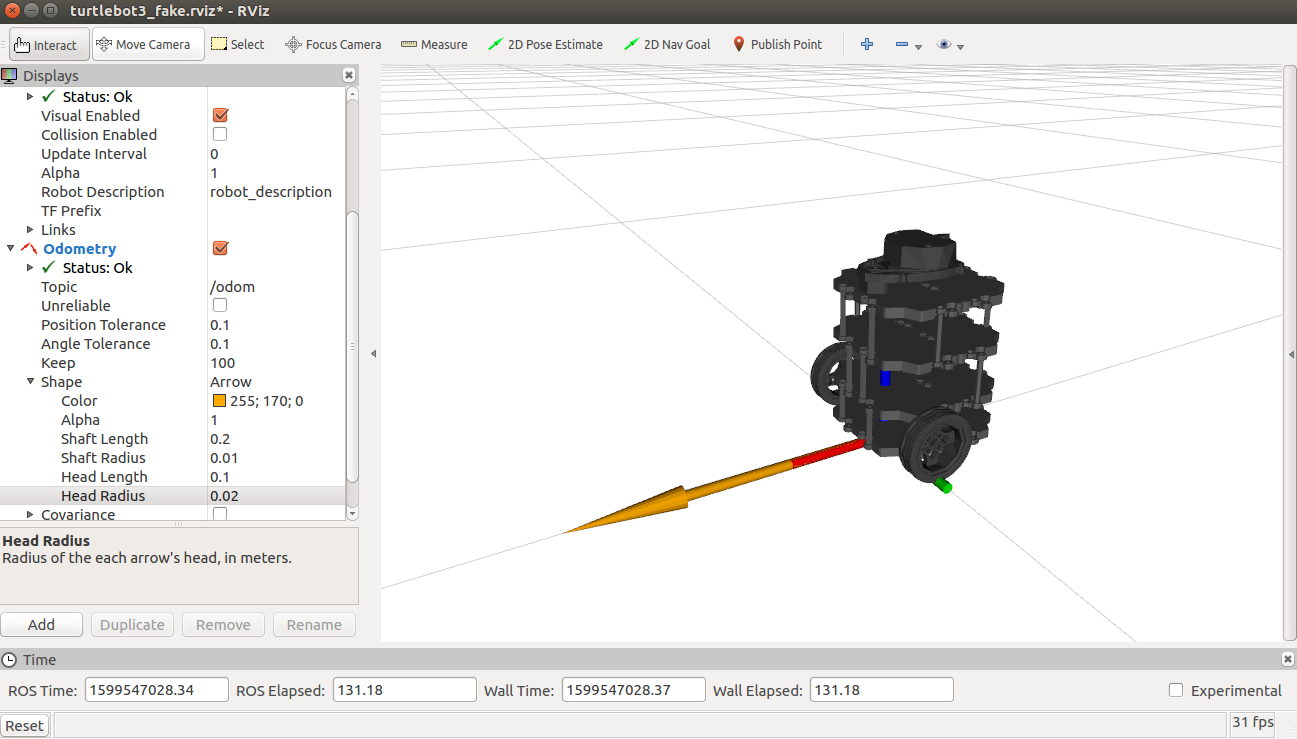
不出意外的话,你会看到类似下图的界面,可以通过键盘控制小车运动。
Turtlebot3仿真1-ROS仿真环境搭建(kinetic版)
https://kevinloongc.github.io/posts/26186.html