Turtlebot3仿真2-加载Gazebo环境
本文最后更新于:2022年5月29日 上午
前言
- 运行环境:Ubuntu 16.04 + ROS Kinetic
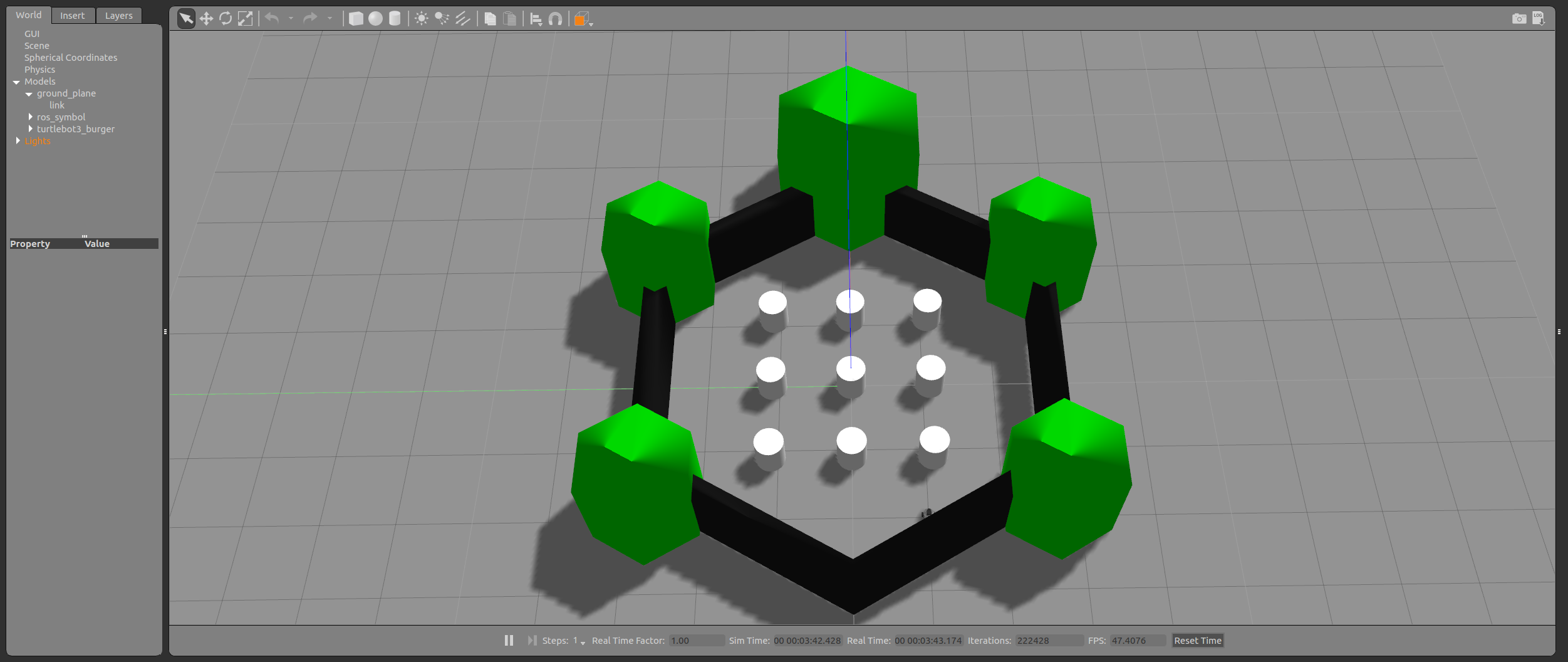
加载Gazebo环境
在Gazebo加载TurtleBot3 World
1 | |
注意:
首次可能会出现无法加载打开Gazebo环境的情况,可以参考博文ROS下gazebo不能加载模型解决。
在Gazebo环境上控制TurtleBot3
关闭退出前面的窗口。打开新终端,输入下面的命令:
启动键盘控制
1
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch加载Gazebo环境
1
roslaunch turtlebot3_gazebo turtlebot3_world.launch启动仿真
1
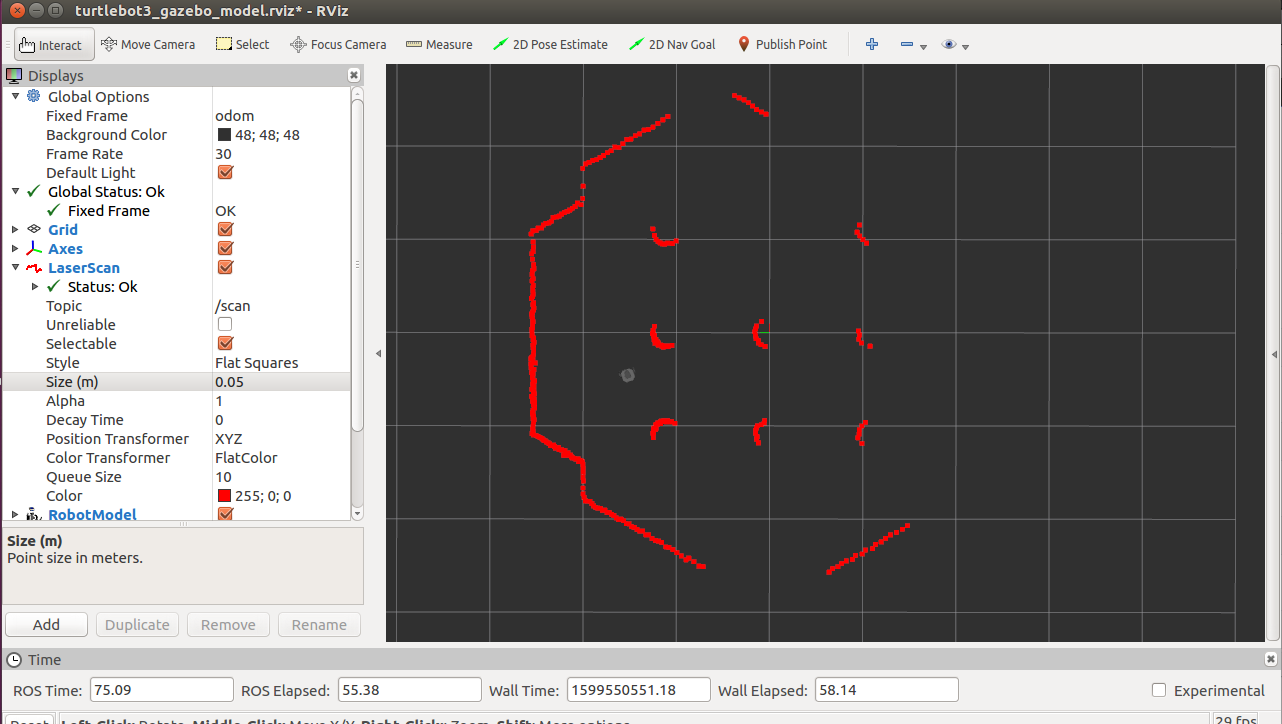
roslaunch turtlebot3_gazebo turtlebot3_simulation.launch启动RViz
1
roslaunch turtlebot3_gazebo turtlebot3_gazebo_rviz.launch
Turtlebot3仿真2-加载Gazebo环境
https://kevinloongc.github.io/posts/57650.html