Turtlebot3仿真3-建图和导航
本文最后更新于:2022年5月29日 上午
在Gazebo的仿真环境上进行模拟建图和导航
前言
- 运行环境:Ubuntu 16.04 + ROS Kinetic
操作步骤
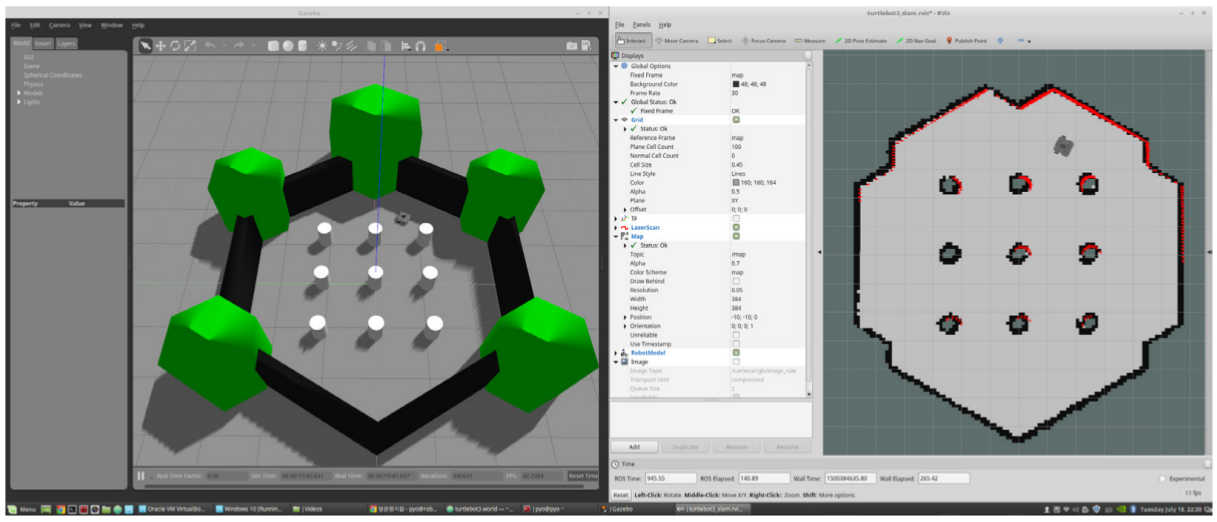
Gazebo环境下建图
加载Gazebo环境
1
roslaunch turtlebot3_gazebo turtlebot3_world.launch启动SLAM程序
1
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping启动键盘控制程序
1
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch通过键盘控制机器人移动进行建图,建图完成后使用下面命令保存地图:
1
2cd cd ~/tb3_ws/src/turtlebot3/turtlebot3_navigation/maps/
rosrun map_server map_saver -f map
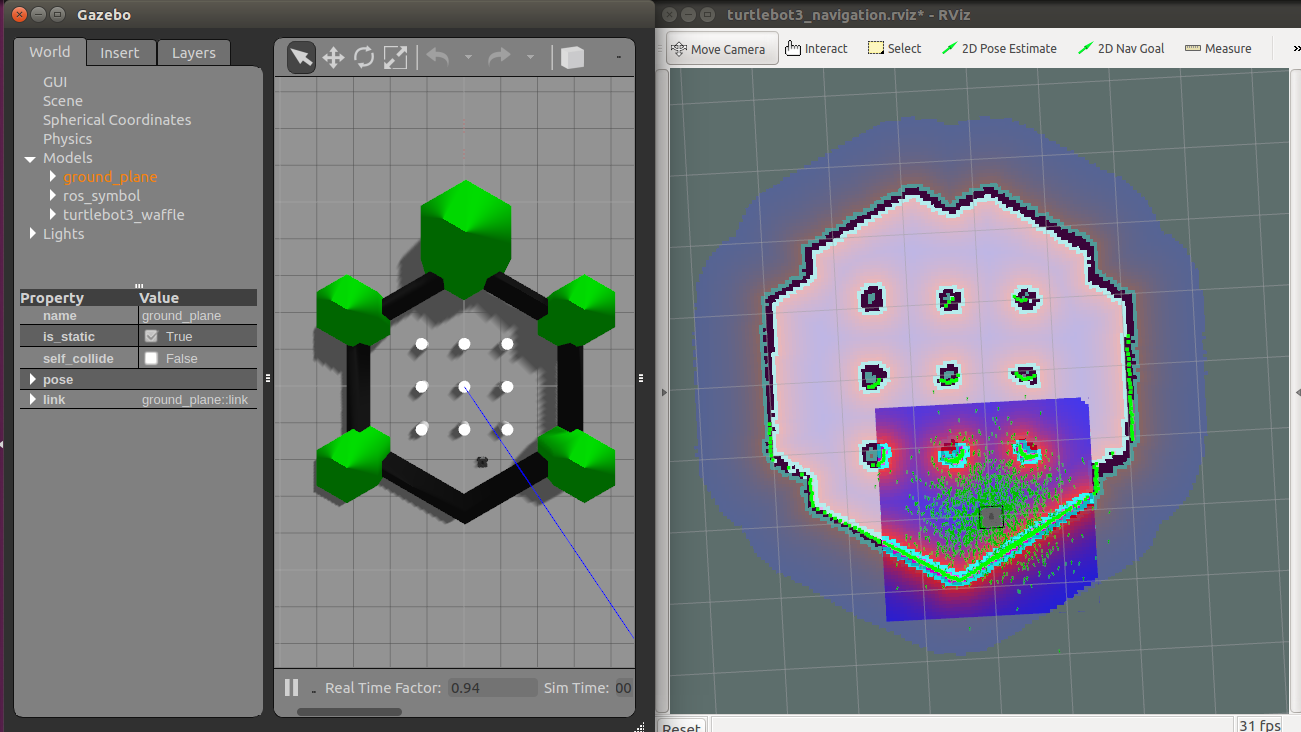
Gazebo环境下导航
加载Gazebo环境
1
roslaunch turtlebot3_gazebo turtlebot3_world.launch启动导航程序
1
roslaunch turtlebot3_navigation turtlebot3_navigation.launch
通过2D Nav Goal 选择目标点,机器人会自动规划路线进行移动导航到目标点。
Turtlebot3仿真3-建图和导航
https://kevinloongc.github.io/posts/34207.html