绝对位置坐标转化为相对位置坐标
本文最后更新于:2022年5月29日 上午
将目标点的绝对位置坐标转化为机器人的相对位置坐标
假设已知世界坐标系XOY中的两点G(x1,y1)、P(x2,y2),G为机器人当前位置坐标,P为目标点坐标。机器人当前位姿相对于世界坐标系的偏移角度为θ。XOY为世界坐标系;XGY为世界坐标平移到G点的参考坐标系;X’GY’为机器人坐标系。如下图所示:
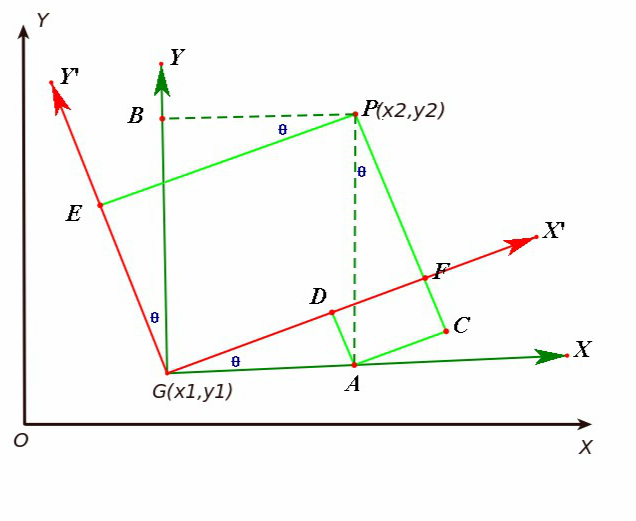
求P点在机器人坐标系X’GY’中的位置坐标(x’,y’):
1 | |
参考链接:
【1】二维坐标系的转换
绝对位置坐标转化为相对位置坐标
https://kevinloongc.github.io/posts/d3d0f6a5.html